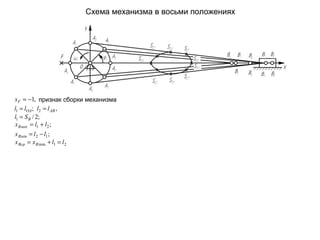
Схема механизма в положениях

Рычажные механизмы. Часть 1.
Загрузить всю книгу. Кинематической схемой называют его изображение в выбранном масштабе. Кинематические пары обозначают большими буквами латинского алфавита.











 - что это такое, устройство, принцип работы, применение")

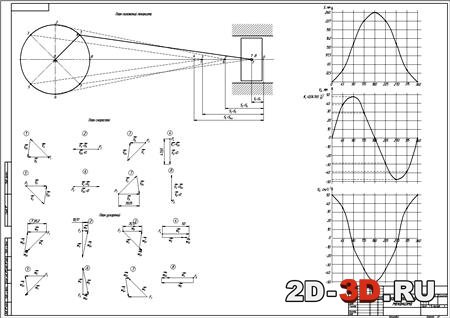
Как уже отмечалось в п. Это означает, что решение задач кинематического анализа для плоских рычажных механизмов выполняют в течение промежутка времени, соответствующего одному обороту задающего начального звена. Решением первой задачи кинематического анализа является план положений механизма, синтез которого осуществляется с использованием метрического синтеза. План положений механизма - это графическое изображение взаимного расположения звеньев механизма за рассматриваемый промежуток времени, выполненное в определенном масштабном коэффициенте рис. Метрический синтез плана положений плоского рычажного механизма начинают с изображения элементов стойки, т.
- Решение задач и лекции по технической механике, теормеху и сопромату
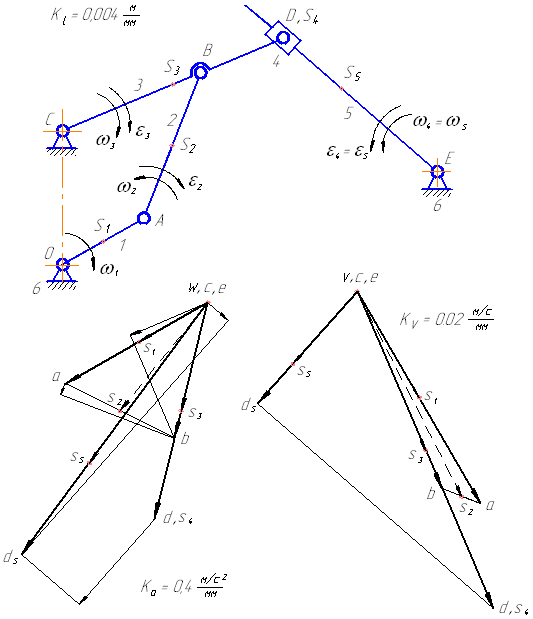
- Точность результатов графического метода исследования механизма зависит от тщательности исполнения графических построений и принятого масштаба их. Под масштабом в теории механизмов понимается отношение истинной величины, измеренной в соответствующих единицах, к длине отрезка линии, изображающего эту величину на чертеже, измеренного в миллиметрах.
- Лови 5! Магазин готовых работ.
- Если в преобразовании движения участвуют жидкие или газообразные тела, то механизмы называются соответственно гидравлическими или пневматическими. Механизмы составляют важнейшую часть большинства машин , они применяются также в приборах, аппаратах и различных технологических устройствах.







")




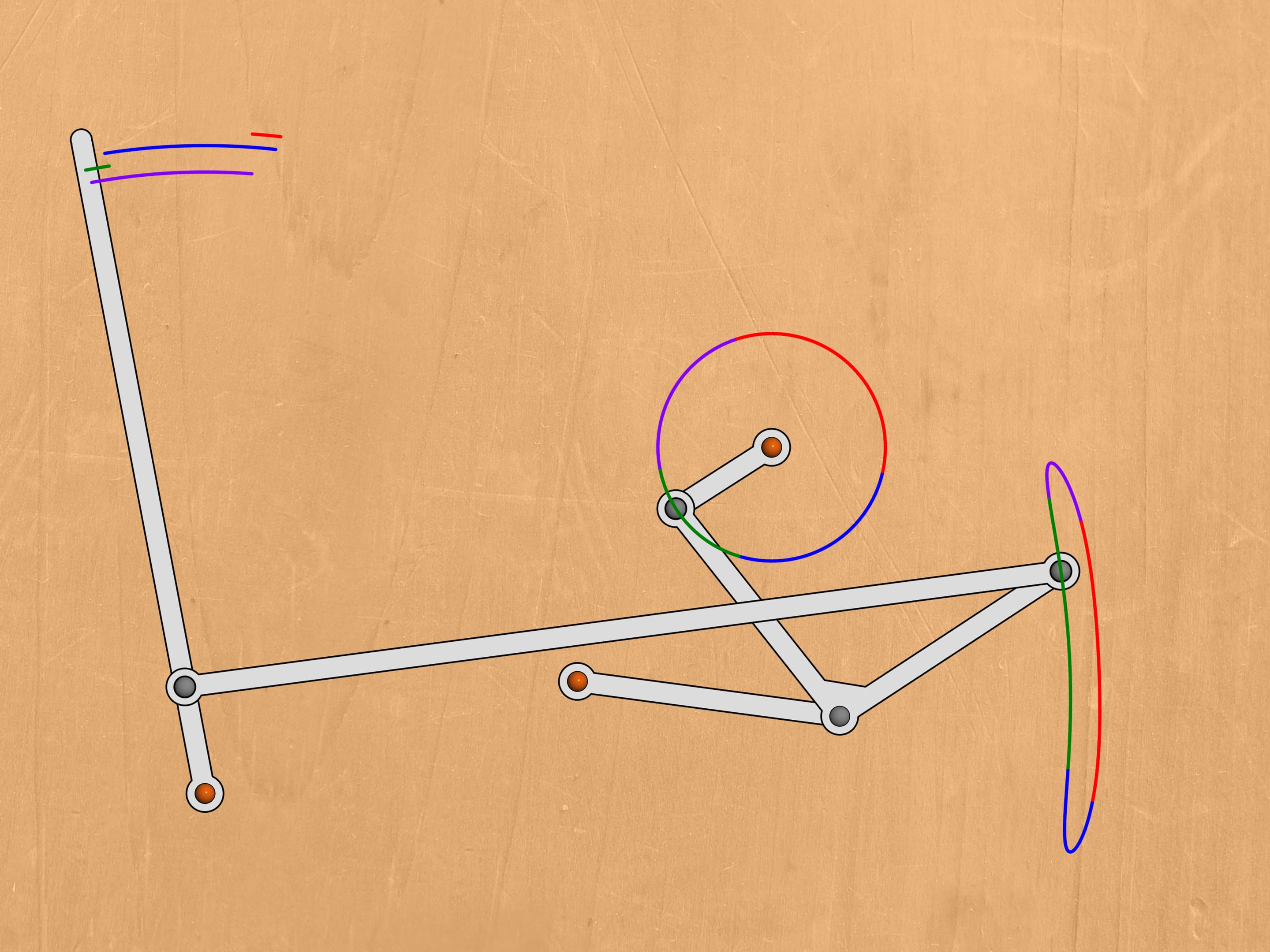
Достаточно долго и давно использую системы автоматизированного проектирования в своей профессиональной деятельности и повседневной жизни для прикладных задач разного рода. И на досуге пришла мысль о том, что параметризация может быть крайне полезной для курсового проекта по теории механизмов и машин в части построения плана положений механизма и оценки его кинематики и геометрии. Конечно же, только этим ее применение ни в коем случае не ограничивается :. Для примера возьмем простой дезаксиальный кривошипно-шатунный механизм:. Рассмотрим начальное звено - кривошип. Он совершает только вращательное движение вокруг неподвижной стойки по окружности, значит на точку кривошипа, связанную через шарнир со стойкой, накладываем зависимость ограничение "фиксированная точка".